2022.08.26 현대자동차그룹

미래 모빌리티의 안전 기술은 어떤 방향으로 진화하게 될까? 위급 상황이 발생하면 운전자가 직접 대응하고 자동차가 보조하는 현재의 안전 체계와는 달리, 자율주행 기술을 기반으로 하는 미래 모빌리티는 통제권의 주체가 바뀌기 때문에 다른 차원의 안전 기술이 필요하다. 달리 말해, 상황에 따른 모든 대응 과정을 모빌리티가 자체적으로 끝마쳐야 한다는 이야기다.
이런 상황이 예상되는 가운데 현대차그룹은 미래 모빌리티 세상의 실현을 앞두고 특허 출원을 통해 자율주행 차량의 브레이크 고장 대응 시스템을 공개했다. 해당 기술은 완전 자율주행 모빌리티를 전제로 하며, 브레이크 장치에 오류가 발생하는 예기치 못한 상황에서 다른 차량 간의 상호작용으로 피해를 최소화하는 사고 대응 기술이다.
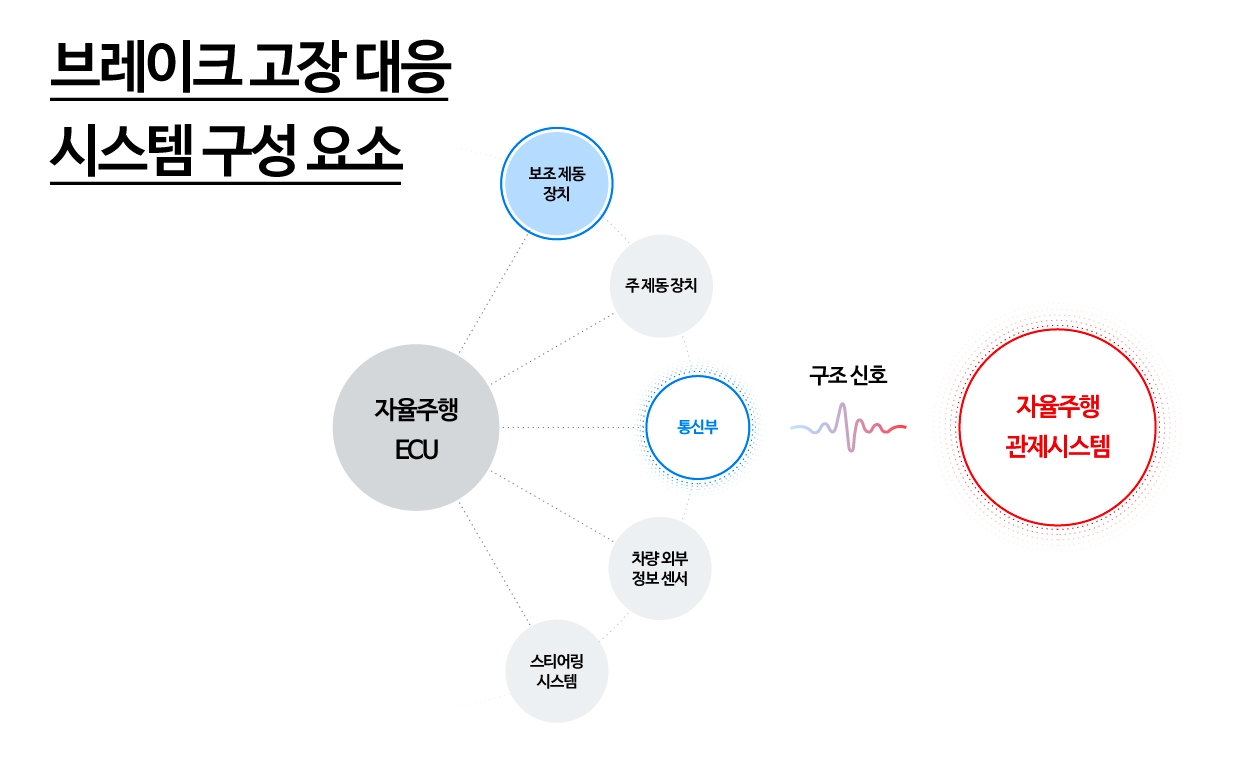
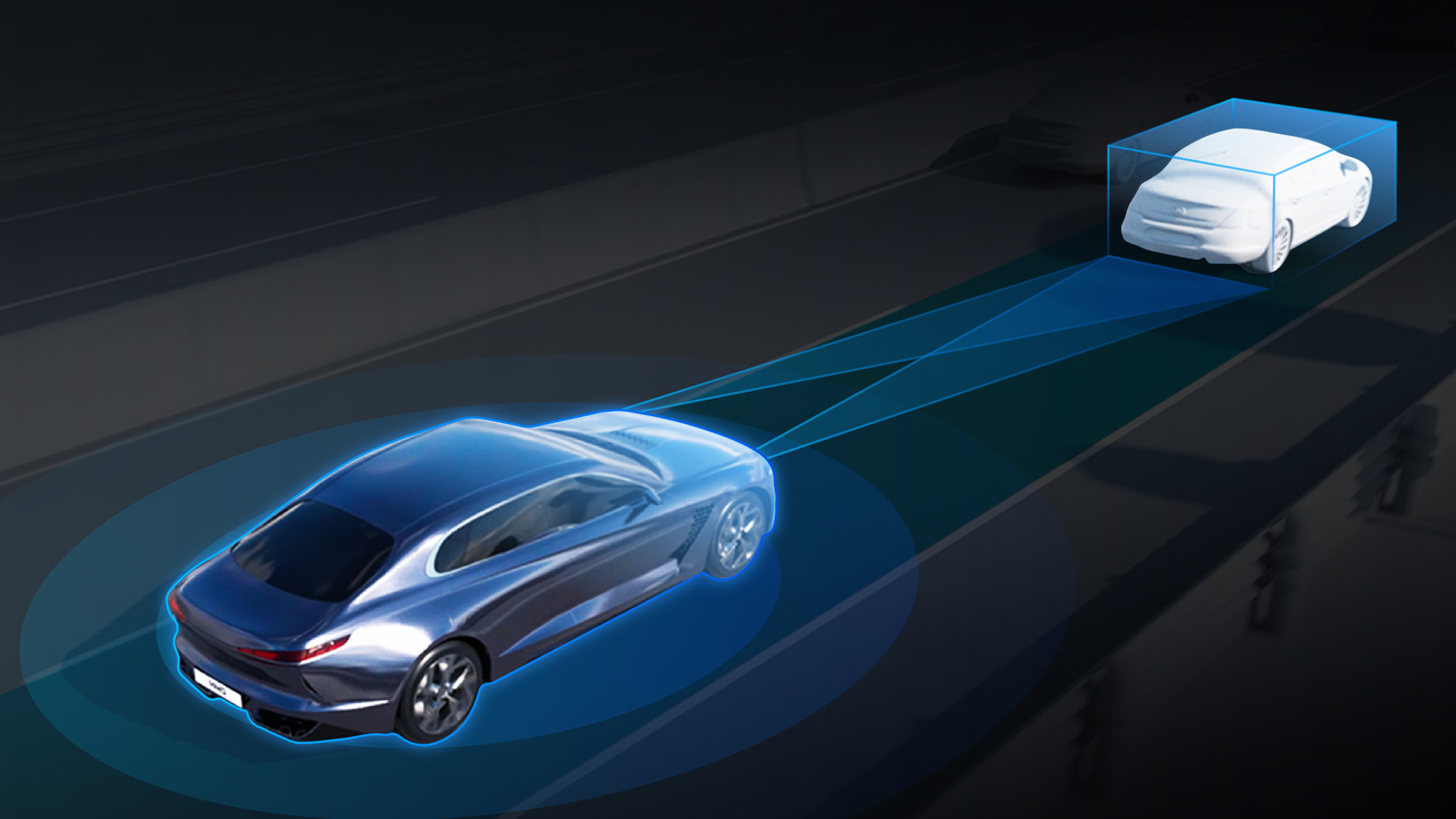
현대차그룹이 제시한 자율주행 차량의 브레이크 고장 대응 시스템은 크게 이와 같은 요소들이 체계를 이뤄 작동한다. 우선 자율주행 차랑은 ECU(Electronic Control Unit, 전자 제어장치)를 중심으로 구동을 위한 전기 모터, 조향 및 제동 장치 등을 갖춘다. 여기에 카메라 및 라이더 등으로부터 도로 상황과 같은 외부 정보를 수집하여 탑승자의 목적지에 따라 주행 관련 요소를 제어한다.
여기서 주목할 점은 주 브레이크 시스템을 보조하는 별도의 추가 브레이크가 마련되어 있다는 점이다. 이동수단의 안전에서 가장 중요하게 여겨지는 제동 장치의 중첩(redundancy) 구성으로 기능의 보완과 함께 안전 사고를 최소화하는 것이 미래 자율주행 모빌리티의 기본적인 안전 체계일 것이라는 예측에 따라 이뤄진 구성이다.

자율주행 기술이 현재와 같은 과도기를 지나 일반적인 기술로 자리 잡은 미래에는 문제 발생 시 탑승자가 차량 조작에 개입하기 어려울 가능성이 있다. 이에 대한 대책으로 현대차그룹은 자율주행 모빌리티들의 주행 상황과 상태를 관장하는 자율주행 관제시스템과 지속적으로 통신하는 안전 체계를 상정했다. 탑승자가 해결하기 어려운 트러블을 미연에 방지하고, 유사시에는 이에 대응하는 플랜을 구성해 모빌리티 이용자들의 안전을 보장하기 위함이다.

이러한 체계를 바탕으로, 브레이크 고장 대응 시스템은 다음과 같은 시나리오로 작동한다. 자율주행 차량 A(이하 차량 A)가 주행 도중 제동이 필요한 상황에서 ECU를 통해 메인 제동 장치의 작동을 확인한다. 반응이 없으면 ECU는 다시 한번 보조 제동 장치를 거쳐 제동 가능 여부를 판별한다. 이때 보조 제동 장치까지 사용이 불가능하다고 판단되면 ECU는 가장 가까운 자율주행 관제시스템을 향해 제동 시스템에 문제가 있다는 신호를 전달한다.
차량 A로부터 위치 및 속도, 주행 중인 도로 정보를 전달받은 관제시스템은 고장 차량과 가장 가까이에서 주행 중인 차량에게 구조 신호를 보낸다. 신호를 수신한 자율주행 차량 B(이하 차량 B)는 고장 차량을 안전하게 정지시키기 위해 차량 A가 관제시스템에게 전달한 정보를 토대로 조향 시스템을 제어한다.

차량 B는 구조 진행 상황을 관제시스템에게 전달함과 동시에 고장 차량과 같은 차선으로 주행하도록 접근한다. 여기서 관제시스템은 고장 차량의 무사 처리를 위해 차량 B를 제외한 주변 차량이 해당 차선에 주행하지 않도록 지시한다. 같은 차선으로 이동한 차량 B는 주행 속도와 조향 시스템을 꾸준히 조절하며 차량 A의 범퍼에 접촉해 차량의 속도를 서서히 줄인다. 이때 차량 A가 안전하게 주행 상태를 유지하도록 차량 B도 주행 경로를 동기화하여 전기 모터와 섀시를 미세하게 제어한다. 꾸준한 차량 제어로 고장 차량이 완전히 멈추면 관제시스템에 구조 완료 신호를 보낸 후 구조 작업을 끝마친다.

해당 기술의 핵심은 무선 통신을 거쳐 주변 차량과의 상호작용으로 사고를 완화하는 데에 있다. 이는 통신 방식과 대응 방법을 달리해 다양한 형태로 응용될 여지가 있다. 예컨대 모빌리티 간 호환이 가능한 도킹 시스템을 적용해 모빌리티 사이의 직접적인 충돌을 방지하는 시스템도 고려해 볼 수 있다. 아울러 관제 시스템을 거쳐 타 차량과 통신하는 구조 이외에도, V2V 통신을 활용해 모빌리티끼리 직접 구조 신호를 주고받는 기술로의 발전을 기대해 볼 수 있다.

브레이크 고장 대응 시스템은 주변 차량의 연동 제어를 통해 차량 충돌 사고로 발생하는 인명 피해와 물적 손해를 최소한으로 줄이기 위한 공익적인 목적을 지닌다. 이러한 미래 기술 트렌드를 통해 미래 모빌리티 시대는 *페일 세이프(Fail safe) 중심의 기술 개발이 보편화될 전망이다. 따라서 브레이크 고장 대응 시스템의 기본 구조 중 하나인 보조 제동 장치와 마찬가지로 모빌리티 안전 시스템의 중첩 개발 역시 활발하게 이루어질 것이라 예측해 볼 수 있다.
*페일 세이프 : 기계나 시스템이 오작동을 일으킬 경우, 안전한 방향으로 흘러가도록 설계하는 방식 또는 장치

그러나 본 특허 기술을 실현하기 위해서는 수많은 기술 개발과 치밀한 인프라 구축이 필요하다. 예컨대 자율주행 관제시스템과 같은 자율주행 모빌리티들의 완벽한 통제를 위한 기술적, 제도적 기반이 마련되어야 하며, 제조 업체가 상이한 자율주행 모빌리티들의 통신 방식도 통일해 자유로운 커뮤니케이션이 가능해야 한다는 조건도 깔려 있다. 하지만 분명 언젠가는 도래할 미래이기에 현대차그룹은 상상력을 발휘해 자율주행 시대를 준비하고 있다.
현대차그룹은 브레이크 고장 대응 시스템 기술에 대한 특허를 세계 3개국(미국, 중국, 한국)에 출원했으며, 가능성이 희박한 만약의 상황까지 고려한 전방위 안전 체계를 구축하기 위해 자율주행 기술의 기초부터 완성도를 꾸준히 높여가고 있다. 또한 모든 사람들이 이동의 자유를 누릴 수 있는 모빌리티 사회를 실현하고자, 현대차그룹은 ‘교통사고 사상자 제로’를 목표로 한 안전 기술 개발을 멈추지 않을 것이다.